融合注意力模块CBAM基于轻量级yolov5n开发共享单车目标检测系统
创始人
2024-05-10 01:08:58
0次
在很多的项目实战中验证分析注意力机制的加入对于模型最终性能的提升发挥着积极正向的作用,在我之前的一些文章里面也做过了一些尝试,这里主要是想基于轻量级的n系列模型来开发构建共享单车检测系统,在模型中加入CBAM模块,以期在轻量化的基础上进一步提升模型的检测性能。首先来看下效果图:

这里数据集的目标对象只有一个就是:bicycle(共享单车)
使用的模型yaml文件如下:
#Parameters
nc: 1 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32#Backbone
backbone:# [from, number, module, args][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, C3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9]#Head
head:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, C3, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, C3, [256, False]], # 17 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, C3, [512, False]], # 20 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, C3, [1024, False]], # 23 (P5/32-large)[-1, 1, CBAM, [1024]],[[17, 20, 24], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]
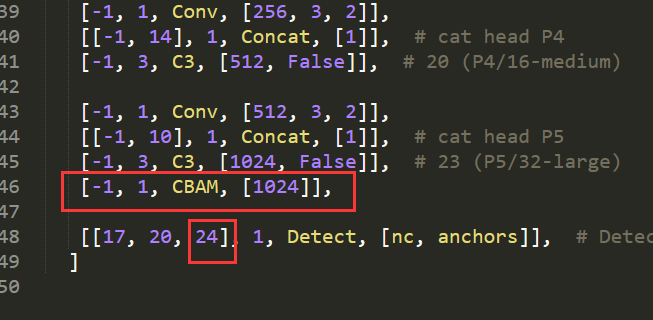
这里在检测头前面加入了CBAM模块,同时最终的层索引号也要加1处理变成了24。
简单看下数据情况:

都是平时比较场景的路边室外的拍摄素材。
VOC格式标注数据文件:

YOLO格式标注数据文件:

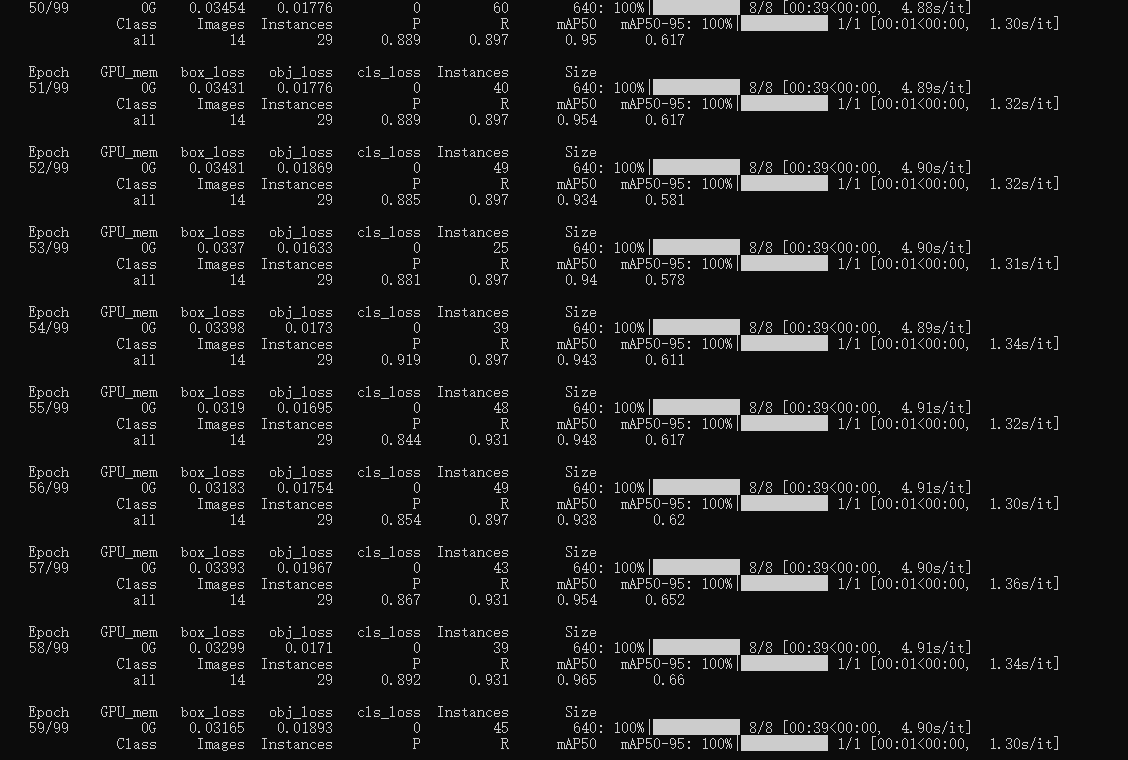
默认设定100次epoch计算,我是在CPU模式下面进行训练的,日志输出如下所示:


结果目录数据如下所示:

标签可视化如下:

F1值曲线和PR曲线:

混淆矩阵:

检测实例如下:

后续使用基于专门的界面实现推理可视化如下所示:

上传图像:
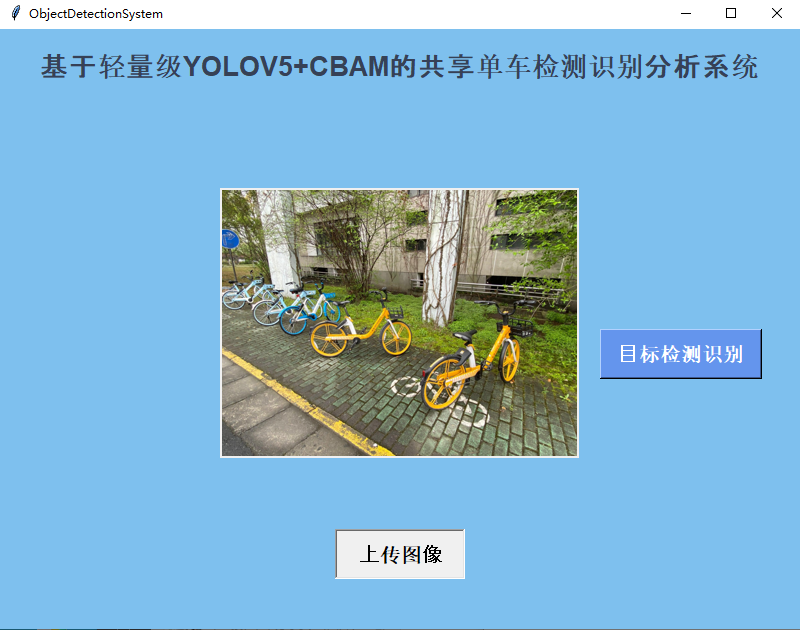
推理检测:

上一篇:网络基础(一)
相关内容
热门资讯
新疆阿勒泰:“银发族”驭雪正青...
中新社新疆阿勒泰12月31日电 题:新疆阿勒泰:“银发族”驭雪正青春 中新社记者 蒋文月 正...
这份“年度答卷”,我们共同署名
岁序更替,华章日新。当我们站在时间的交汇点,回首,是携手走过的来路;向前,有无限辽阔的未来。这一...
视频丨多国人士:习主席新年贺词...
多国人士表示,习近平主席的新年贺词重申进一步全面深化改革开放和全球治理倡议,向国际社会传递了积极...
惠及超3.6亿人次!2025年...
新华社记者 谢希瑶 记者1日从商务部获悉,2025年,以旧换新相关商品销售额超2.6万亿元,惠...
俄媒:克宫称,“俄一将领在莫斯...
【环球网快讯】据俄新社22日报道,俄罗斯总统新闻秘书、克里姆林宫发言人佩斯科夫称,“俄罗斯一名将领在...
港珠澳大桥2025年客流车流双...
新华社广州1月1日电(记者 王浩明)2025年,经港珠澳大桥珠海公路口岸出入境客流与车流分别超过...
科学与健康|新药来了!检查结果...
一元复始,万象更新。2026年是“十五五”规划的开局之年,展望医疗卫生健康领域,一系列新政将陆续...
东西问丨穆罕默德·曼苏里:中国...
中新社南昌12月31日电 题:中国实践如何助力保障全球粮食安全? ——专访联合国粮农组织助理总...
一批新规正式施行 事关社会治安...
央视网消息:2026年1月1日起,有一批事关社会治安、保育教育、电动汽车、网络安全等多方面的新规...
【好评中国】两江评 | 拼搏的...
元旦佳节,辞旧迎新。当新年的钟声敲响,2025年完美收官。回首过去这一年,每一个人都以坚韧不拔的...